画像技術ソリューション

リアルタイムな3次元画像処理のニーズが高まっています。ポジティブワンでは、3次元データを取得するために、すべての主要なカメラベースの技術をサポートします。Time of Flight、三角測量(ストラクチャライト、レーザ・ビジョン、ステレオ)の3次元画像処理のハードウエアからソフトウエアのシステムインテグレーションサービスを提供します。
- ToFハードウエア(Sentis ToFシリーズ、Argos 3Dシリーズ、FOTONIC E70シリーズ、Fotonic E40シリーズ )
- ToFソフトウエア(Merilus)
ToF(Time of Flight)
Time of Flightとは
Time of Flightは、輝度(グレイ値)とカメラ(深度)の2つの情報により、3Dイメージのセンサです。主に、ハードウエアの基本要素は、①アクティブなライト、②レンズ、③イメージセンサ の組み合わせとなります。
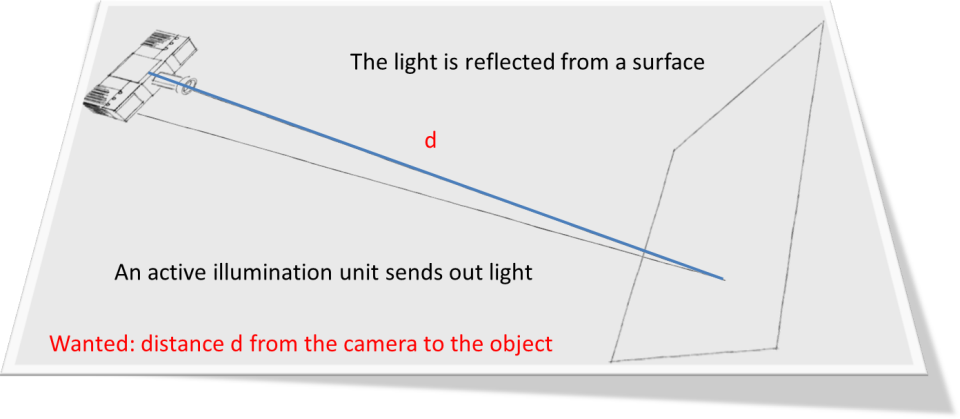
動作原理は、以下の図のように、アクティブ照明デイバスから近赤外領域に強度変調された光を放射します。光を受けた対象物または表面は、バックカメラに反映されます。 反射光はレンズを用いた撮像素子上に投影されます。 放出された受信信号を相関させることにより、各画素についてのセンサに照射オブジェクト/シーンの距離を計算することが可能です。取得された奥行き情報からかなりいい3次元表面データは、リアルタイムで再構成することができます。
Time of Flightで利用されるカメラ技術と期待
デジタル静止画カメラのような従来の画像センサは、行列状に配列された複数のフォトダイオードから成ります。 通常、これらのダイオードは、シーンのグレースケールまたはカラー画像を提供します。通常のカメラとは対照的に、光子混合装置(PMD;Photon Mixing Device)センサは、さらに強度(グレー)の値に同時に各画素についての距離値を取得します。大きな違いは、TOFセンサは、距離センサからなる行列です。 (従来の画像センサと比較して)機能改善にもかかわらず、ToF型センサ自体は依然として標準CMOS技術で製造されています。 したがって、イメージング及び3次元計測機能は、アナログ - デジタル変換器のようなシステム関連の電子機器の隣に配置することができ、センサ等の全ての「知能」は、各画素について距離計算を含む、チップに組み込まれています。ToF型ピクセルは、時々「スマートピクセル」と呼ばれています。
最近では、ジェスチャ認識や自動車の乗客分類用ToF型センサとのToFのようなアプリケーションには、民生用電子機器の部品になろうとしています。 ToF型センサは、毎秒30フレーム以上の速度でデータを提供するように、それらは、リアルタイム3次元イメージングのために適しています。
ポジティブワンでは、ToF型技術を利用した様々な事業分野内のアプリケーションを強化するために、ハードウエアおよびソフトウエアの両面にて、貢献できると確信しています。
Time of Flightソリューション案内
- Time of Flightハードウエア
- Time of Flightソフトウエアおよび受託開発
三角測量
三角測量は、3次元データを作成するために、2つ(またはそれ以上)の視点を使用します。 そのため、いずれかの二つのセンサまたはセンサと別の場所で特別な光源の組み合わせである可能性があります。
ストラクチャ・ライト
ストラクチャ・イメージングで事前定義された光パターンを物体上に投影されると同時に取得したシーンの距離画像を生成するカメラで観察した。
レーザ・ビジョン
ライト部は、構造化光イメージングの特別な場合と考えることができる3-D画像化モダリティです。 最も基本的なライトのセクションの設定は、ラインレーザ、既知の内部パラメータ、スキャンする対象物とカメラで構成されています。 三角測量、オブジェクトの表面上のレーザの線の歪みに基づいて、対象物の三次元形状を復元することができます。
理想的には、レーザラインは、高精度なカメラの画像で自動的に検出することができます。検出結果の信頼性および品質は右カメラを選択することによって、不要な画像情報を取り除くために、付加的な帯域通過フィルタを使用することによって改善することができます。レーザー線が検出された場合には、次のステップは、レーザによって放出される光によって定義されるレーザ平面の推定です。 平面を算出するために、この平面上の3つの線形独立なポイントが必要とされています。そして、三次元座標は、バックグラウンドでのレーザーラインの画素座標、キャリブレーションパターンとカメラの内部パラメータから計算することができます。
レーザ平面が知られており、レーザラインに属する画素が識別されると、オブジェクトの表面上の点の3次元座標を算出することができます。レーザライン上の各画素について、シーン内のレーザ線のカメラから始まる線は、カメラの内部パラメータから計算することができます。ピクセルが表すレーザ平面と、この線と交差することにより3次元座標点のは計算することができます。 レーザラインに沿って、全ての画素について、座標を計算、一つ一つの視点から物体の表面を再構成することができる複数のレーザラインのための全プロセスを繰り返す。オブジェクトの全体の3次元モデルは、異なるオブジェクトの向きを持つ複数の面を要求される場合を計算し、単一のモデルに登録する必要があります。
高品質のラインレーザーと高解像度カメラを使用することにより、オブジェクトは、非常に高い精度で走査することができます。 オブジェクトは、ライン毎に走査する必要がしかし、これは、コストがかかります。 これは、レーザ(ロボットアーム、ピエゾミラー、...)を移動させることによって、または物体自体(回転板、コンベアベルト、...)を移動させることによって達成することができます。 この制限はまた、唯一の静的オブジェクトは、リアルタイムイメージングのために、この技術は不適当、走査することができるということになります。
ステレオ・ビジョン
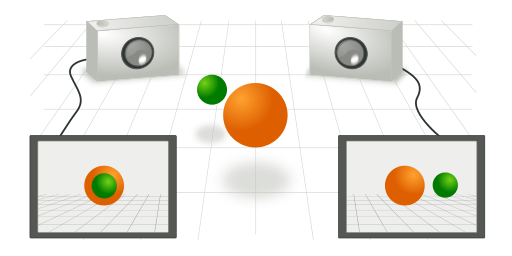
ステレオビジョンは、3-D測定値を導出するために2つの正規のカメラからの画像データを利用します。 これらの測定値を用いて、観察されたシーンの表面の3次元モデルを再構成することができます。簡単に言えば、対応点は、両方の画像内で識別され、カメラ、射影幾何学の両方の相対的な位置についての知識と、シーン点の3次元位置を算出することができます。
最初に、2台のカメラが較正されます。まず、焦点距離などのようなその固有のパラメータは、「MetriCalibrate」ライブラリを組み込みことによって決定されます。これらのパラメータを使用して1画素ごとにビュー光線方向を算出することができます。第二に、お互いに両方のカメラの相対的な位置は、例えばMetriCalibrateステレオを使用して確立されます。
画像技術ソリューション
リアルタイム3次元カメラのニーズへの対応
画像技術ソリューションとして、リアルタイム3次元カメラを利用した機器が、新たなモダリティとして浮上してきております。そのなかで、ハードウエアおよびソフトウエアの構築にあたり、試行錯誤から実現的なシステムになるための提案をいたします。
Metrilusアルゴリズム採用
リアルタイム3次元カメラが動作するために、ハードウエアメーカがSDKやドライバを準備しております。その多くは、ハードウエアを動かすためのサンプルです。3次元計測のために制度をあげるため、使用条件の検証テストサービス、Metrilus独自のリアルタイム3次元ライブラリ(カメラとセンサーのキャルブレーション、データ検出、ポジショニング等の精度をあげる工夫、そして、システムとして動作するために制御ができるAPIの提供)をしております。このことにより、リアルタイム3次元カメラのハードウエアに付属したソフトウエアに依存した開発から、システムにあったリアルタイム3次元カメラの性能を出しながら、ソフトウエアを提供することができるサービスを出すことができます。